Quantum Notes can help you learn more about Electrical Machines-II. Access critical, frequently asked questions to ace your Aktu Btech examinations. Get ahead with us today! Unit-5 Single Phase Induction Motor
Dudes 🤔.. You want more useful details regarding this subject. Please keep in mind this as well. Important Questions For Electrical Machines-II: * Aktu Quantum * B.tech-Syllabus * Circulars * B.tech AKTU RESULT * Btech 3rd Year * Aktu Solved Question Paper
Q1. What do you mean by forward slip and backward slip in single-phase induction motor ?
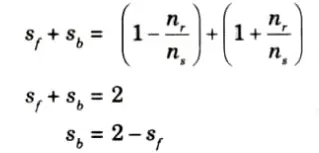
Ans. 1. We know that the slip


2. By definition, the direction in which the rotor is started initially will be called the forward field.

3. Since the backward rotating flux rotates opposite to the stator, the sign of nr must be changed to obtain backward slip thus,

4. Adding eq. (5.2.1) and (5.2.2)
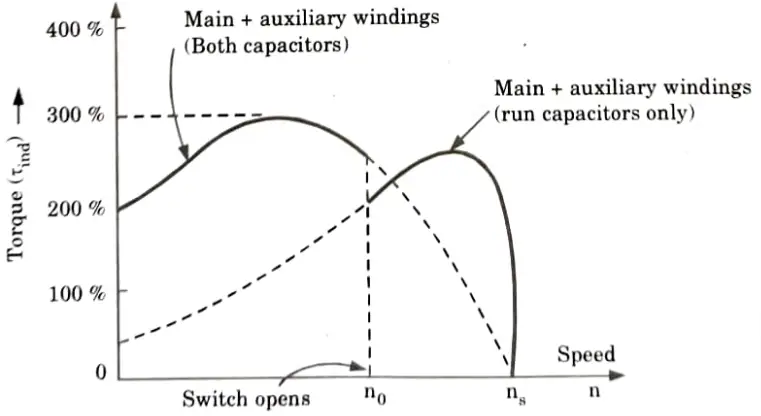
Q2. Discuss the working principle of capacitor start capacitor run motor and also explain its equivalent circuit.
Ans.
- 1. Fig. shows the schematic diagram of a two-value capacitor motor.
- 2. It has a cage rotor and its stator has two windings namely the main winding and the auxiliary winding.
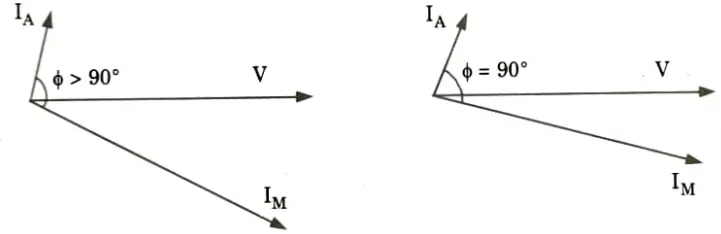
- 3. The two windings are displaced 90° in space. The motor uses two capacitors CS and CR. The two capacitors are connected in parallel at starting.
- 4. The capacitor CS is called the starting capacitor,
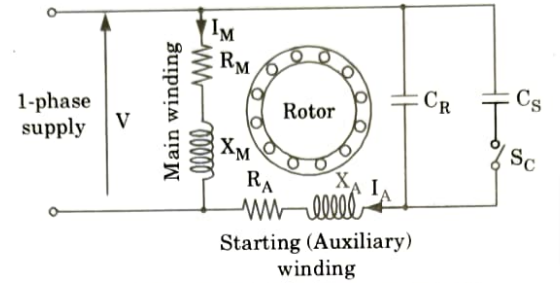
- 5. In order to obtain a high starting torque, a large current is required. For this purpose, the capacitive reactance XA in the starting winding should be low.
- 6. During normal operation, the rated line current is smaller than the starting current. Hence the capacitive reactance should be large.
- 7. The torque-speed characteristic of a 2-value capacitor motor is shown in Fig.
Q3. Explain the constructional details and working principle of 1𝝓 reluctance motor. Also mention its domestic applications. What are the advantages and disadvantages of this motor?
Ans. A. Construction:
- 1 Construction of 1𝝓 reluctance motor is similar to the 3𝝓 salient pole synchronous motor.
- 2. Reluctance motor has a stator carrying the armature winding that produces rotating field, as in case of synchronous salient pole motor.
- 3. It has salient pole rotor that houses copper bars as in case of 3𝝓 synchronous salient pole rotor, with only the difference that, here the copper bars provide the induction torque unlike the synchronous salient pole rotor.
B. Working principle:
- 1. It is based on the conversion of electromechanical energy.
- 2. As the stator generates a synchronously rotating magnetic field, the rotor begins to revolve in the direction of field rotation due to the induction motor effect.
- 3. Because the rotor is non-cylindrical, the magnetic path resistance offered by the rotor to the rotating field is a function of space angle.
- 4. The reluctance torque is caused by the rotor’s inclination to align itself in the smallest reluctance position with regard to the synchronously rotating flux.
- 5. As a result, when the rotor approaches the synchronous speed through induction action, it is brought into synchronism during the positive half cycle of the sinusoidally varying synchronous torque.
C. Domestic applications: Washing machine, bladeless fan, vacuum cleaner, fan heater.
D. Advantages:
- 1. Simple and low cost due to absence of rotor windings or permanent magnets and can be easily cooled as losses appear in stator only.
- 2. It provides high starting torque.
- 3. Temperature specification of rotor is higher.
- 4. It can provide very high speeds of rotation.
E. Disadvantages:
- 1. Less efficiency.
- 2. Poor power factor.
- 3. Need cf very low inertia rotor.
- 4 Less capacity to drive the loads.
Q4. Explain the operation of stepper motor and state some important applications of stepper motor.
Ans.
- 1. The stepper motor is a type of synchronous motor that is designed to rotate through a set angle known as a step angle in response to each step electrical pulse received by its control unit.
- 2. The step sizes are 7.5°, 15° or larger.
- 3. The stepper motor is used in digitally controlled position control system in open loop mode. The input command is in the form of train of pulses to turn a shaft through a specified angle.
Types of stepper motor:
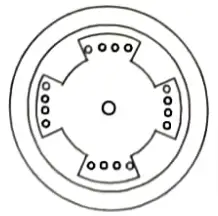
A. Single-stack variable reluctance motor:
- 1. It has a salient pole (or tooth) stator. The stator has concentrated windings placed over the stator pole.
- 2. The number of phases of the stator is determined by how the stator coils are connected.
- 3. Three or four phase windings are typically used.
- 4. The rotor is a slotted structure constructed of ferromagnetic material that is devoid of winding.
- 5. Because the stator and rotor are built of high-quality magnetic materials with high permeability, the excitation current required is minimal.
- 6. A magnetic field is produced when the stator phases are activated in the right sequence from a DC source using semiconductor switches.
- 7. The ferromagnetic rotor is located in the position with the least reluctance to the stator field. In other words, the rotor axis aligns with the stator field axis.
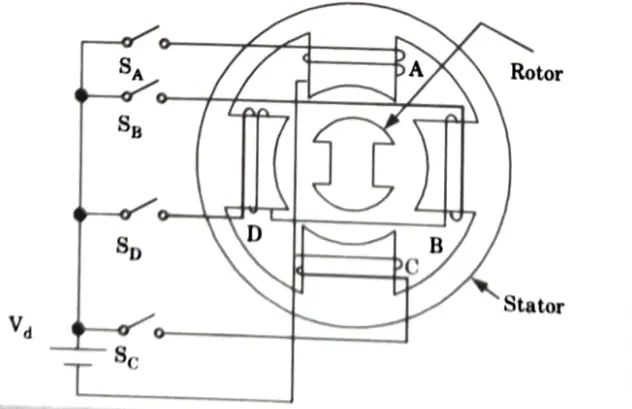
B. Permanent magnet stepper motor:
- 1. It features four stator poles and six rotor poles, resulting in a 30° step angle.
- 2. All winding end terminals are brought out to terminal box 2 for DC excitation.
- 3. Such a motor’s rotor has an even number of poles built of a high retentivity steel alloy.
- 4. Both the rotor and the stator can use either salient or non-salient pole construction.
- 5. The stator pole windings are wrapped in such a way that when any winding’s control switch is closed, the pole of that winding becomes magnetised north.

C. Advantages:
- 1. Compatible with digital systems.
- 2. There are no sensors required for position and speed sensing because they can be obtained directly by counting input pulses, periodic counting input pulses, and periodic counting if speed information is required.
D. Applications:
Positioning of print heads, pens in XY-plotters, recording heads in computer disc drives, and work tables and tools in numerically controlled machine equipment are all done with paper feed motors in typewriters and printers.
Q5. Explain principle of operation of universal motor. Draw and explain its operation characteristics.
Ans. A Construction:
- 1. Universal motors are small capacity series motors that can work on a DC supply or a single phase alternating supply of the same voltage and have similar characteristics.
- 2. It is manufactured in two types:
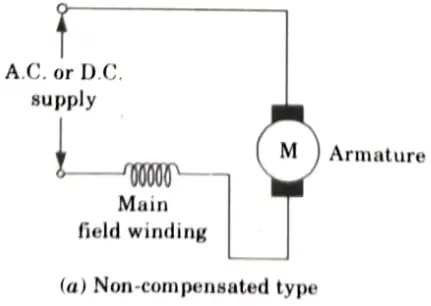
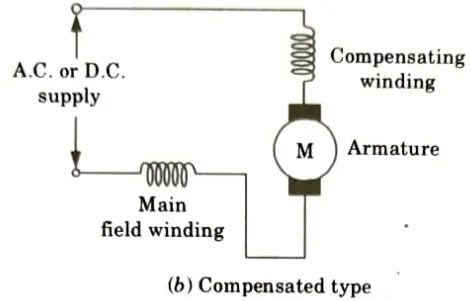
- a. Non-compensated, low h.p.
- b. Compensated type, high h.p.
- 3. Non-compensated type pole has 2 poles, having entire magnetic path as laminated.
- 4. Armature is wound type similar to the normal DC motor. Such non-compensated construction is shown in the Fig.
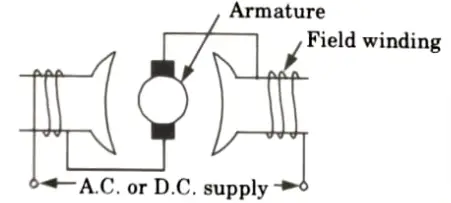
- 5. When the motor is compensated, it features a dispersed field winding consisting of a main field and a compensating winding. The connection schematics for both types of universal motors are shown in Fig.
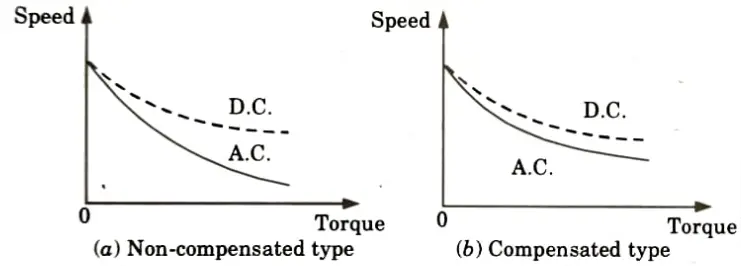
B. Speed-torque characteristics:
C. Applications of universal motor:
- 1. Portable Drills
- 2. Hair Dryers
- 3. Grinders
- 4. Table fans
- 5. Blowers
- 6. Speed control.
- Q6. Explain brushless DC motor. Also give its advantages.
Ans.
- 1. A brushless DC motor is a synchronous polyphase motor with a permanent-magnet rotor.
- 2. Without its electronic controller, this motor cannot function. As a result, a brushless DC motor is a motor drive system that integrates an AC motor, a solid-state inverter, and a rotor position sensor into a single device.
- 3. The solid state inverter employs low-power transistors and high-power thyristors.
- 4. The rotor position sensor monitors the shaft position and provides control signals to the inverter’s controlled switches in the correct sequence.
- 5. A brushless DC motor is sometimes known as a ‘inside-out’ DC motor due to its construction being the inverse of that of a regular DC motor.
- 6. The rotor has permanent-magnet field poles, while the stator has polyphase armature winding.
- 7. With a brushless DC motor, the role of the mechanical commutator in a normal DC motor is now performed by an electronic commutator.
8. This motor possesses following advantages over conventional DC motor:
- i. It has a longer life because no mechanical commutator or brushes are required.
- ii. Radio frequency and electromagnetic interference issues are minimised.
- iii. It can operate at far higher speeds than a regular DC motor.
- iv. Brushless DC motors are more energy efficient.

Electrical Machines-II Btech Quantum PDF, Syllabus, Important Questions
| Label | Link |
|---|---|
| Subject Syllabus | Syllabus |
| Short Questions | Short-question |
| Question paper – 2021-22 | 2021-22 |
Electrical Machines-II Quantum PDF | AKTU Quantum PDF:
| Quantum Series | Links |
| Quantum -2022-23 | 2022-23 |
AKTU Important Links | Btech Syllabus
| Link Name | Links |
|---|---|
| Btech AKTU Circulars | Links |
| Btech AKTU Syllabus | Links |
| Btech AKTU Student Dashboard | Student Dashboard |
| AKTU RESULT (One VIew) | Student Result |