Quantum Notes will help you improve your understanding of Electrical Machines-II. To ace your Aktu Btech exams, access critical, commonly asked questions. Get a head start with us today! Unit-4 Three Phase Induction Machine-II
Dudes 🤔.. You want more useful details regarding this subject. Please keep in mind this as well. Important Questions For Electrical Machines-II: * Aktu Quantum * B.tech-Syllabus * Circulars * B.tech AKTU RESULT * Btech 3rd Year * Aktu Solved Question Paper
Q1. Discuss auto-tran sformer starting method of 3ɸ induction motor.
Ans.
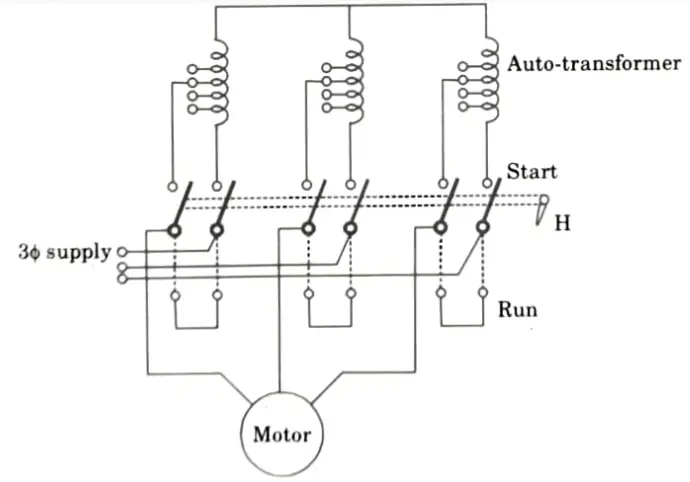
- 1. Auto-transformer starter is suitable for both star and delta connected motors. In this method, by using a 3ɸ auto-transformer tapping. the starting current is limited.
- 2. Auto-transformer starter connection diagram is shown in Fig.
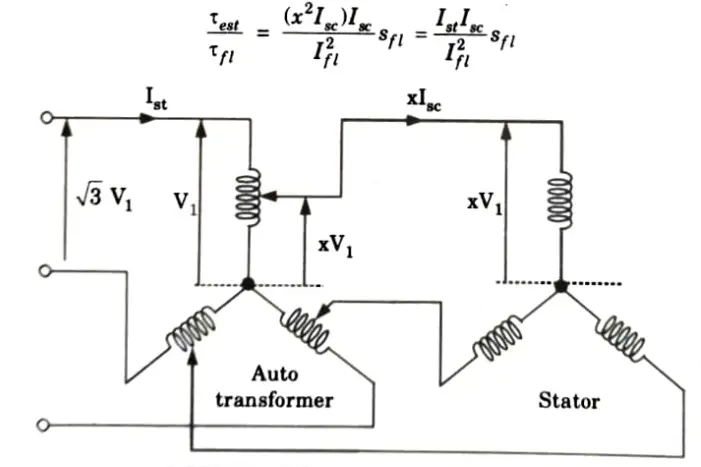
3. With auto-transformer, per phase starting current in motor winding

4. If no load current = 0A
then per phase input VA = per phase output VA

6. From eq. (4.2.1),
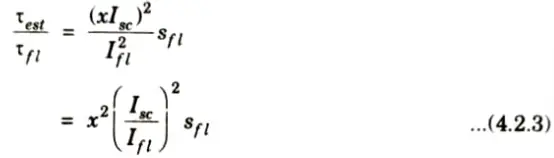
8. From eq. (4.2.2) and (4.2.3),

9. From eq. (4.2.3),
Q2. Explain the working of deep-bar and double-cage rotor induction motors.
Ans. A. Deep-bar rotor:
- 1. Fig. shows a cage rotor with deep and narrow bars.
- 2. A bar may be assumed to be made up of number of narrow layers connected in parallel.
- 3. Fig. shows three such layers A, B and C. It is seen that the top most layer element A is linked with minimum leakage flux and, therefore, its leakage inductance is minimum.
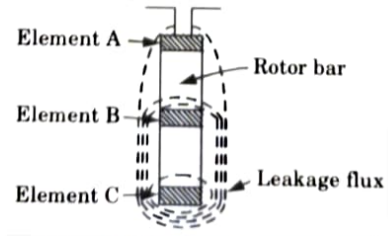
- 4. In contrast, the bottom layer C links with the greatest leakage flux. As a result, its leakage inductance is highest.
- 5. In the start, the rotor frequency equals the supply frequency.
- 6. The bottom layer element C has a higher resistance to current flow than the top layer element A.
- 7. As a result, maximum current flows through the top layer and minimal current flows through the bottom layer.
- 8. Because of the unequal current distribution, the effective rotor resistance rises while the leakage reactance falls.
- 9. In starting conditions with a high rotor resistance, the starting torque is comparatively larger and the starting current is significantly lower.
- 10. Under normal operating conditions, the slip and the rotor frequency are very small. The reactances of all the layers of the bar are small compared to their resistances.
B. Double-cage rotor:
- 1. For strong starting torque at low starting current, an induction motor with two rotor windings or cages is utilised.
- 2. A double-cage rotor induction motor’s stator is comparable to that of a standard induction motor. As seen in Fig., the double-cage rotor has two layers of bars.
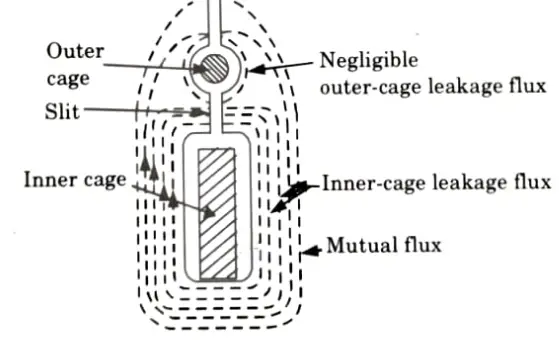
- 3. Each layer is short circuited by end rings.
- 4. The outer cage bars have a smaller cross-sectional area than the inner bars and are constructed of high-resistance materials such as brass, aluminium bronze, and so on.
- 5. The inner-cage bars are constructed of copper with a low resistance. As a result, the resistance of the outer cage is greater than that of the inner cage.
- 6. A slit runs between the top and bottom slots. The slit improves leakage flux permeance around the inner-cage bars.
- 7. As a result, the leakage flux connecting the inner-cage winding is substantially bigger than that connecting the outer-cage winding, and the inner winding has a higher self inductance.
- 8. The voltage induced in the rotor at startup is the same as the supply frequency. As a result, the leakage reactance of the inner-cage winding is significantly greater than that of the outer-cage winding.
- 9. As the rotor speed increases, so does the frequency of the rotor emf. The leakage reactance of both windings becomes negligible at typical operating speeds.
Q3. Compare deep-bar induction motor with a double-cage induction motor.
Ans.
| S. No. | Deep-bar | Double-cage |
| 1. | Starting current is high hence, not suitable for direct on-line starting. | Starting current is low hence, suitable for direct on-line starting. |
| 2. | Starting torque is low. | Starting torque is high. |
| 3. | Effective rotor resistance is low hence at start rotor heating is not severe. | Effective rotor resistance is high hence at start rotor heating is large. |
| 4. | As rotor resistance is low rotor copper losses are less and efficiency is more. | The rotor copper losses are high due to high rotor resistance and efficiency is less. |
| 5. | The breakdown torque or maximum torque is more. | Because two cages produce maximum torques at different speeds, the breakdown torque or maximum torque is reduced. |
| 6. | The leakage reactance is low. | The effective leakage reactance is high. |
| 7. | The power factor is high. | The power factor is low. |
| 8. | The torque-slip characteristics are fixed and constant. | A wide range of torque-slip characteristics can be obtained by carefully selecting the resistances and reactances of the inner and outer cages. |
| 9. | For same rating, cost is low. | For same rating, cost is high due to double cages. |
Q4. Sketch torque-slip characteristic of double cage induction motor and also compare cage torques.
Ans. A. Torque-slip characteristic:
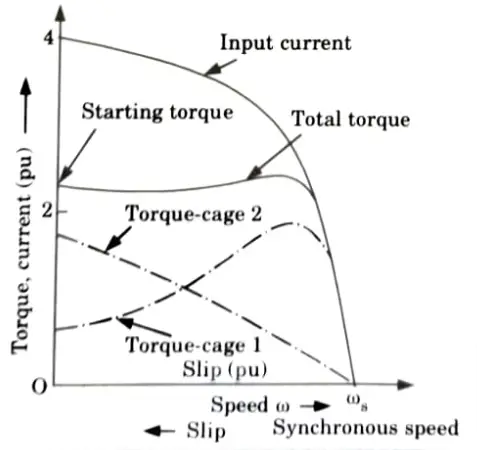
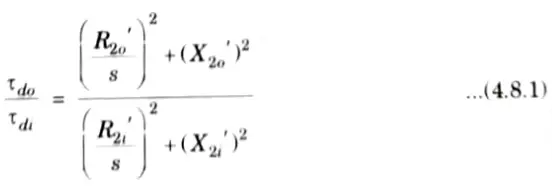
- 1. It is assumed that the two cages develop two separate torque. The total torque of the motor is equal to the sum of the two cage torques.
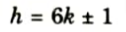
- 2. The torque-slip characteristics of the two cages and total torque of the motor is shown in Fig.
B. Comparison of cage torques:
1. Power developed per phase by the outer cage
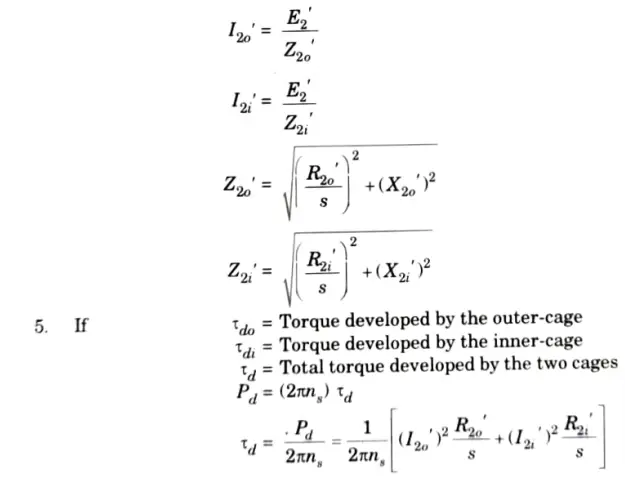
2. Power developed per phase by the inner cage
3. Power developed per phase by both the cages

4. From the equivalent circuit of the double-cage motor
Q5. What are the effects of space harmonics on 3-phase induction motor performance ?
Ans.
- 1. A 3-phase winding carrying sinusoidal currents produces space harmonics of the order
where k is a positive integer (1, 2, 3, …).
- 2. The synchronous speed of the hth harmonic is (1/h) times the speed of the fundamental wave. The space harmonic waves rotate in the same direction as the fundamental wave if h = 6k + 1, and in the opposite direction if h = 6k -1.
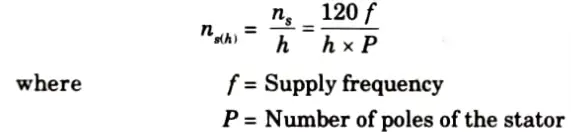
- 3. A space harmonic wave of order h is equivalent to a machine with number of poles equal to (h x number of poles of the stator). Therefore, the synchronous speed of the hth space harmonic wave is
- 4. Thus, for k = 1, a 3-phase winding will produce predominant backward rotating fifth harmonic rotating at a speed of (1/5) of synchronous speed and forward rotating seventh harmonic rotating at a speed of (1/7) of synchronous speed.
- 5. Because the fifth harmonic flux rotates in the opposite direction as the rotor, the fifth harmonic torque opposes the fundamental component torque and generates braking torque.
- 6. The seventh harmonic flux rotates in the same direction as the fundamental flux and contributes to the torque of the fundamental component.
- 7. As illustrated in Fig., the resulting torque-speed characteristic is a mixture of the fundamental, fifth, and seventh harmonic characteristics.
- 8. Fig. also displays the load torque-speed relationship. The motor will accelerate to the point L, which is the intersection of the load torque characteristic and the motor torque-speed curve, if the motor torque is created solely by the basic flux.
- 9. The load torque curve intersects the motor torque-speed characteristic at point A due to the presence of seventh harmonie flux torque.
- 10. Because the torque curve of the seventh harmonic flux has a negative slope at point A, a stable running condition spanning the torque range between the maximum and minimum points results. The motor torque is less than the load torque.
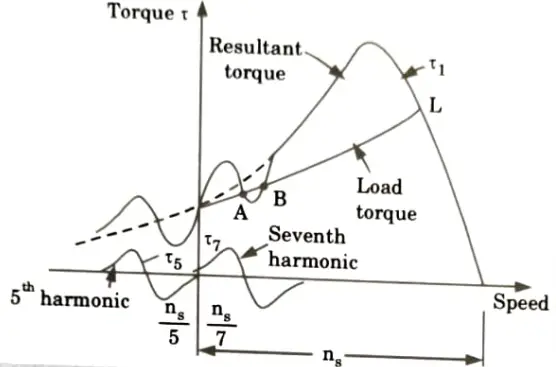
- 11. At this moment, the motor will not accelerate to its regular speed, but will continue to operate at a speed that is nearly (1/7) of its normal speed, and the operating point is A.
- 12. Crawling of the motor is the tendency of the motor to operate at a stable speed as low as one-seventh of its normal speed ns and being unable to get up its regular speed.
- 13. Reduce the fifth and seventh harmonics to reduce crawling. This is possible with a chorded (or short Effect of tuned) winding.
Effect of space harmonics: Space harmonic fluxes are windings caused by slotting, magnetic saturation, air inequalities, and so on. These harmonic gap length fluxes generate voltages and currents in the rotor windings. Harmonic and noise are produced when these harmonic currents in the rotor interact with the harmonic fluxes.
Q6. A 4-pole induction motor and 6-pole induction motor are connected in cumulative cascade at 50 Hz supply. The frequency in the secondary circuit of the 6-pole motor is observed to be 1.0 Hz. Determine the slip in each machine and the combined speed of the set
Ans. Given: P1 =4, P2 = 6,f = 50 Hz, f’ = 1 Hz
To Find: Slip, s.
1. Combined speed of the set,

2. The frequency in the secondary circuit of the 6 pole motor
3. Actual speed of the set,
4. Synchronous speed of 4-pole induction motor,
5. Slip for 4-pole induction motor,

6. The impressed frequency on the second motor

7. Synchronous speed of 6-pole induction motor with frequency f’

8. Slip for 6-pole induction motor,


Electrical Machines-II Btech Quantum PDF, Syllabus, Important Questions
| Label | Link |
|---|---|
| Subject Syllabus | Syllabus |
| Short Questions | Short-question |
| Question paper – 2021-22 | 2021-22 |
Electrical Machines-II Quantum PDF | AKTU Quantum PDF:
| Quantum Series | Links |
| Quantum -2022-23 | 2022-23 |
AKTU Important Links | Btech Syllabus
| Link Name | Links |
|---|---|
| Btech AKTU Circulars | Links |
| Btech AKTU Syllabus | Links |
| Btech AKTU Student Dashboard | Student Dashboard |
| AKTU RESULT (One VIew) | Student Result |