Master Control Systems Using Aktu’s Quantum Notes. Access critical insights and frequently asked questions to ace your B.Tech studies. Your journey to success begins here! Unit-2 Time Response Analysis
Dudes 🤔.. You want more useful details regarding this subject. Please keep in mind this as well. Important Questions For Control System: *Quantum *B.tech-Syllabus *Circulars *B.tech AKTU RESULT * Btech 3rd Year * Aktu Solved Question Paper
Q1. Explain various standard test signals, and also find relation between them.
Ans. A. Standard test signals:
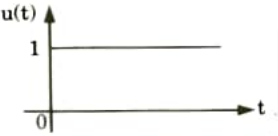
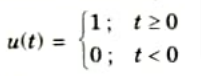
1. Unit step signal:
- i. Signals which start at time t = 0 and have magnitude of unity are called unit step signals.
- ii. They are represented by a unit step function u(t).
- iii. They are defined mathematically as:
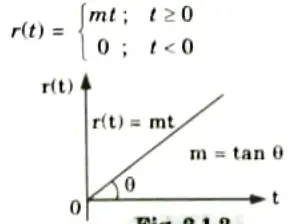
2. Unit ramp signal:
- i. Signals which start from zero and are linear in nature with a constant slope m are called unit ramp signals.
- ii. They are represented by a unit ramp function r(t).
- iii. They are defined mathematically as:
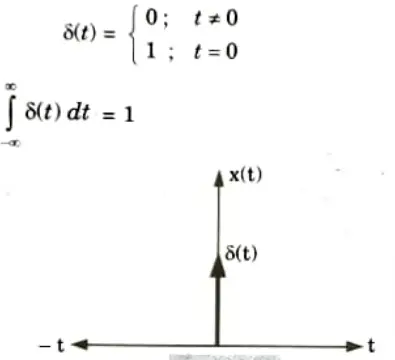
3. Unit impulse signal:
- i. Signals which act for very small time but have large amplitude are called unit impulse functions.
- ii. They are represented by δ(t).
- iii. They are defined mathematically as,
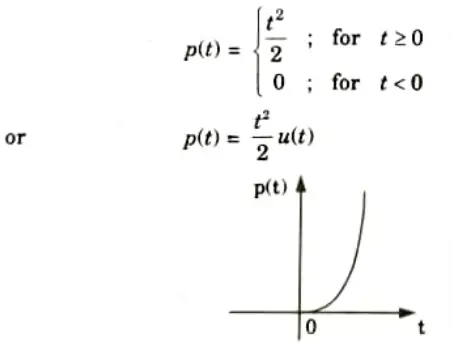
4. Unit parabolic signal : The continuous-time unit parabolic function p(t), also called acceleration signal starts at t = 0, and is defined as:
B. Relation between standard test signals:
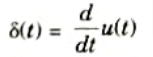
1. Relation between impulse and step signal :
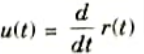
2. Relation between step and ramp Signal:
3. Relation between ramp and parabolic signal:
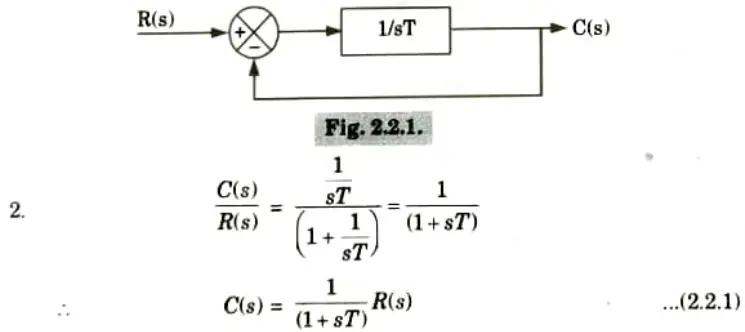
Q2. Derive the time response of first order system.
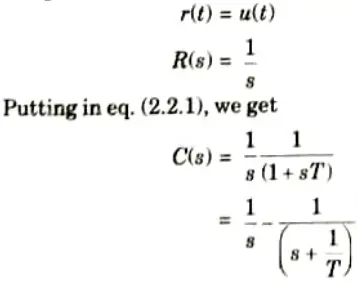
Ans. 1. Consider a first order system with unity feedback.
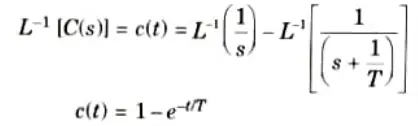
3. Response to unit step input:
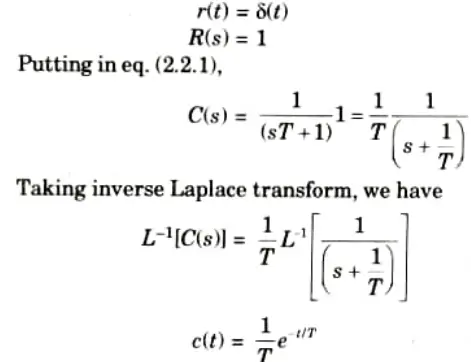
Taking inverse Laplace transform, we have
4. Response to unit impulse input :
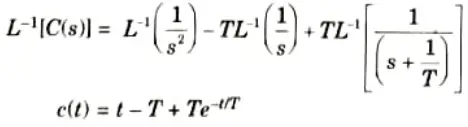
5. Response to unit ramp input:
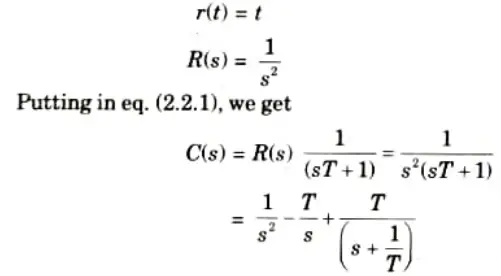
Taking inverse Laplace transform, we have
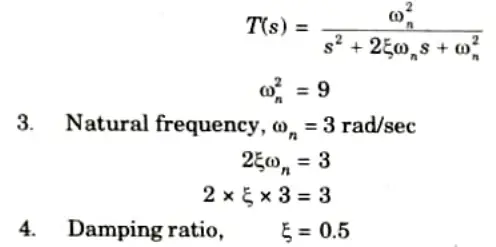
Q3. The open loop transfer function of a unity feedback control system is given by G(s) = 9/s (s + 3). Find the natural frequency of response, damping ratio, damped frequency and time constant.
Ans. 1. Transfer function of closed loop system,
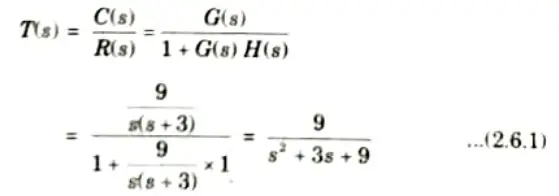
2. Comparing eq. (2.6.1) by standard second order characteristic equation, ‘
5. Damped frequency,

Q4. Define the following term:
i. Rise time
ii. Peak time
iii. Peak overshoot
iv. Settling time
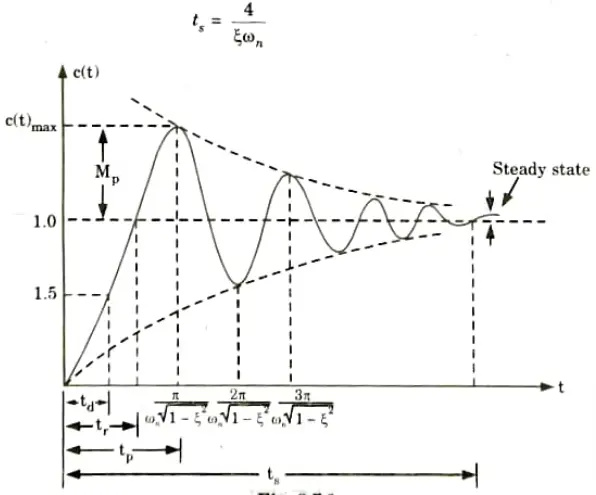
Ans. 1. Delay time (td): It is the time required for the response to reach 50 % of the final value in first time.
2. Rise time (tr): It is the time required for the response to rise from 10% to 90 % of its final value for overdamped system and 0 to 100 % for underdamped systems.
3. Peak time (tp): The peak time is the time required for the response to reach the first peak of the time response or first peak overshoot.

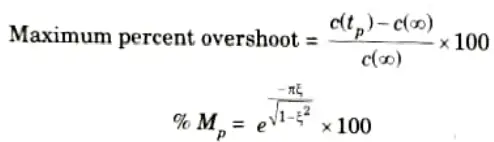
4. Maximum overshoot (Mp): It is the normalized difference between the peak of the time response and steady output. “The maximum percent overshoot is defined as
5. Settling time (ts): The setting time is the time required for the response to reach and stay within the specified range (2 % to 5 %) of its final value.
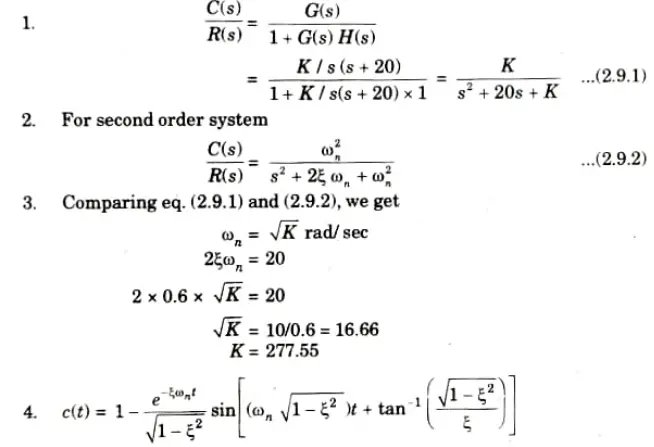
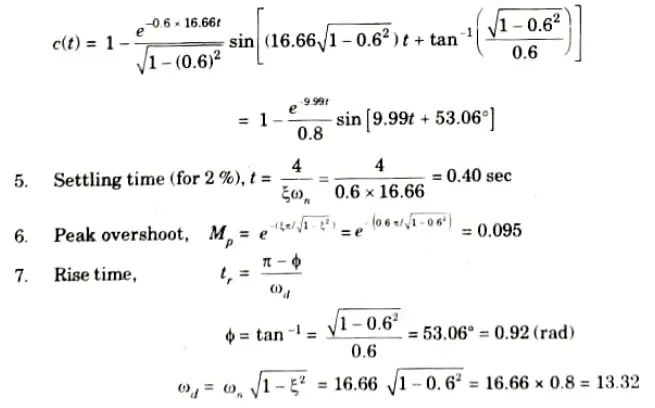
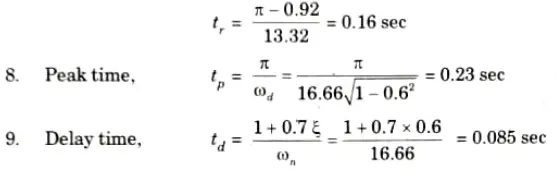
Q5. The unity feedback system is characterized by an open loop transfer function is G(S)= K/s(s + 20). Determine the gain K, so that the system will have a damping ratio of 0.6. For this value of K, determine unit step response, time domain specifications: settling time (2 % criterion), peak overshoot, rise time, penk time, delay time for a unit-step input.
Ans.
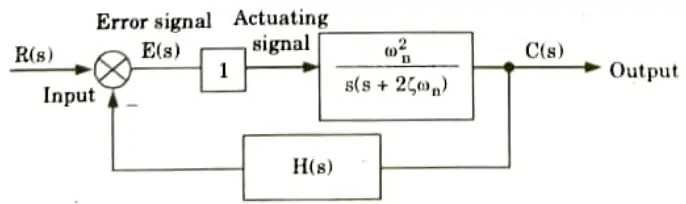
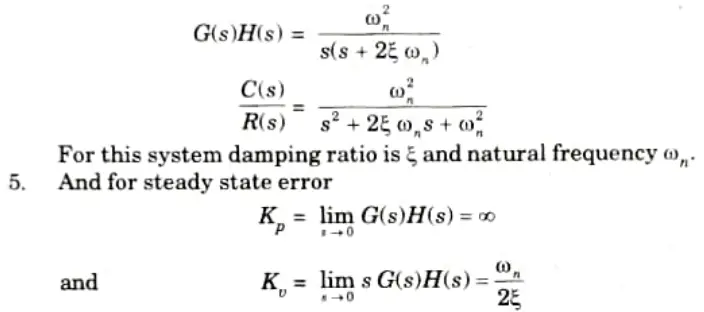
Q6. Write a short note on proportional control. Also write its advantages and disadvantages.
Ans. A. Proportional control:
- 1. In proportional control, the error signal serves as the actuating signal for the control action in the control system.
- 2. The error signal is the difference between the feedback signal acquired from the output and the reference input signal.
- 3. The system described in Fig. is a proportional control system because the actuating signal is proportional to the error signal.
- 4. Take into account a second order system where the mistake itself serves as the controller input and the proportional constant is K=1.
B. Advantages:
- 1. Steady state error is reduced hence the system becomes more stable.
- 2. Easy to implement.
- 3. Relative stability is improved.
C. Disadvantages:
- 1. Due to the presence of these controllers, we get some offsets in the system.
- 2. Proportional controllers also increase the maximum overshoot of the system.

Control System Btech Quantum PDF, Syllabus, Important Questions
| Label | Link |
|---|---|
| Subject Syllabus | Syllabus |
| Short Questions | Short-question |
| Question paper – 2021-22 | 2021-22 |
Control System Quantum PDF | AKTU Quantum PDF:
| Quantum Series | Links |
| Quantum -2022-23 | 2022-23 |
AKTU Important Links | Btech Syllabus
| Link Name | Links |
|---|---|
| Btech AKTU Circulars | Links |
| Btech AKTU Syllabus | Links |
| Btech AKTU Student Dashboard | Student Dashboard |
| AKTU RESULT (One VIew) | Student Result |