Discover Control System Short Question Notes from the B.Tech. AKTU Quantum Book. Investigate the concepts of automation, feedback control, and system analysis for reliable and efficient system functioning in many applications.
Dudes 🤔.. You want more useful details regarding this subject. Please keep in mind this as well. Important Questions For Control System: *Quantum *B.tech-Syllabus *Circulars *B.tech AKTU RESULT * Btech 3rd Year * Aktu Solved Question Paper
Unit-I: Control System Concepts (Short Question)
Q1. What are the major types of control systems ? Explain them in detail with examples.
Ans. There are two types of control system:
1. Open loop control system:
In open loop control systems the control action is independent of the desired output. In this system the output is not compared with the reference input.

Example: Immersion rod, Traffic control system.
2. Closed loop control system:
In a closed loop control system the output has an effect on control action through a feedback as shown in Fig.

Example: Automatic steering control system, Electric iron.
Q2. Lint the advantages of closed loop over open loop system.
Ans. 1. Feedback reduces the sensitivity to parameter variation and noise.
2. It produces beneficial effect on bandwidth, impedance, frequency response.
Q3. Why negative feedback is preferred in closed loop control system ?
Ans. By rejecting any disturbance signals, the negative feedback improves stability in the steady state. Also, it is rather insensitive to changes in the parameter. It follows that closed loop systems prefer negative feedback.
Q4. What are the applications of AC servomotor ?
Ans.
- 1. In feedback control systems
- 2. In aircraft and spacecraft
- 3. In tracking and guidance systems
- 4. In robotics.
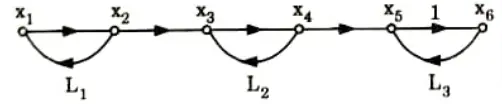
Q5. What is a signal flow graph ?
Ans. A signal flow graph is a visual representation of the system’s simultaneous equations. Due to the existence of a flow graph gain formula that connects the input and output system variables, this alternative technique does not necessitate any reduction step.
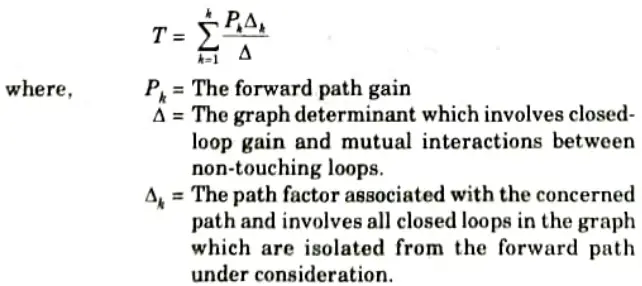
Q6. What is Mason’s gain formula ?
OR
Write the Mason’s gain formula.
Ans. The overall gain can be determined by Mason’s gain formula given below:
Q7. What are the advantages of negative feedback control system ?
Ans. 1. Better frequency response. 2. Less distortion.
3. Less gain or voltage drift. 4. Less temperature drift.
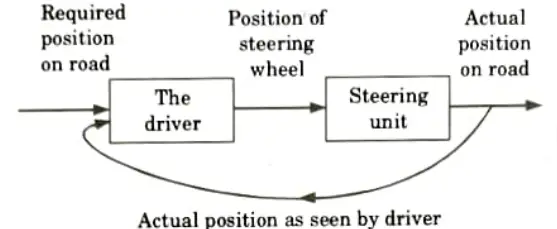
Q8. Draw the block diagram, which represent a driver driving a car.
Ans.
Q9. Define: Self loop and non-touching loop in signal flow graph by suitable example.
Ans. 1. Selfloop: A feedback loop consisting of only one node is called self loop. i.e., G33 at x3 is selfloop.
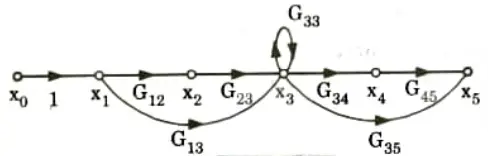
2. Non-touching loops: If there is no node common in between the two or more loops, such loops are said to be non-touching loops.
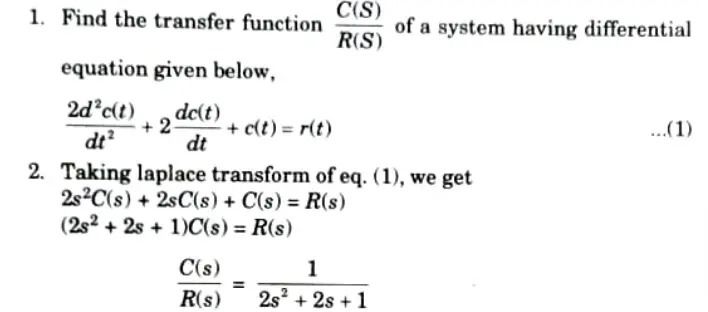
Q10. Define transfer function. Give an example for it.
Ans. A. Transfer function: It is defined as the Laplace transform of output to the laplace transform of input when all initial conditions are set to zero.
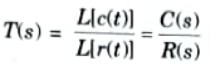
B. Example:
Q11. What are the applications of stepper motor ?
Ans. 1. Paper feed motors in typewriters and printer
2. Recording heads in computer disk drives.
3. Positioning of print heads.
Q12. What is tachometer ?
Ans. Tachometer is electromechanical device that convert mechanical energy into electrical energy.
Unit-II: Time Response Analysis (Short Question)
Q1. What are the standard test signals used in control system ?
Ans.
- 1. Step signal
- 2. Ramp signal
- 3. Parabolic signal
- 4. Impulse signal.
Q2. What is an impulse response ?
Ans. Impulse response is the response of system when we provide impulse signal as input.
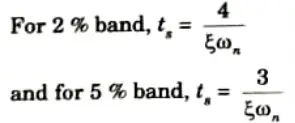
Q3. What do you mean by settling time, write expression for 2nd order system ?
Ans. Settling time is the time required for the response curve to reach and stay within a specified percentage (2% to 5 %) of its final value.
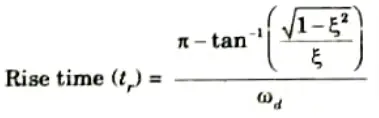
Q4. Define rise time for second order control system.
Ans. Rise Time (tr): Rise time is defined as the time required for the response to rise from 10 % to 90 % (for overdamped) or from 0 % to 100 % (for underdamped) of its final value.
Q5. Define damping ratio.
Ans. Damping ratio indicates the amount of damping present in and system denoted by 𝝃.
Q6. What is steady state error ?
Ans. It indicates the error between the actual output and desired output at t tends to infinity i.e.,

Q7. Distinguish between type and order of a system.
Ans.
| Type | Order |
| The number of poles at the origin gives the type of a transfer function. | The total number of poles gives the order of the transfer function. |
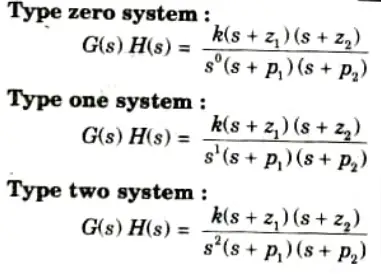
Q8. Give example of type zero, type one and type two systems.
Ans.
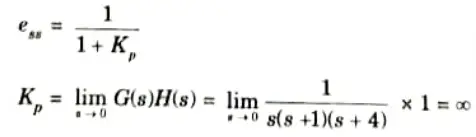
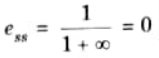
Q9. The OLTF of a unity feedback system is G(s) = 1/s(s + 1)(s +4) find the steady state error (ess) due to a unit step.
Ans. For unit step input steady state error,
Q10. What is damping constant give its relation with time constant ?
Ans. The damping constant is a measure of a system’s settling time.
Relation with time constant: The damping constant is an inverse of time constant.
Q11. Define proportional controller.
Ans. It is a type of control system that reacts in proportion to the difference between the target process variable (or set point) and the variable’s current value.
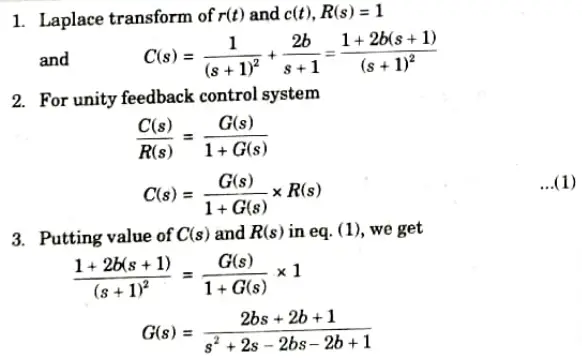
Q12. The impulse response of unity feedback control system is c(t) = te-t + 2be-t, find transfer function.
Ans.
Unit-III: Stability and Algebraic Criteria (Short Question)
Q1. Define a stable system.
Ans. 1. A system is considered stable if its response, or transfer function, decreases as time increases towards infinity.
2. In other words, if every bounded input results in a bounded output, the system is stable.
Q2. State the necessary condition of stability.
Ans. 1. All the coefficients of characteristics equation must have same sign.
2. There should be no missing term.
Q3. State absolute stability and relative stability.
Ans. 1. Absolute stability: A system is said to be perfectly stable if the output is constant for all variations in its parameters. It provides information on how stable or unstable the system is.
2. Relative stability: On the basis of the settling time, the system is deemed to be relatively more stable or unstable. If the system’s settling time is shorter than that of the competing system, the system is deemed to be substantially more stable. The degree of stability or how close to instability it is is indicated by relative stability.
Q4. What are the limitations of Routh Hurwitz criterion ?
Ans. 1. It is valid only if the characteristics equation is algebraic.
2. If any coefficient of the characteristic equation is complex or contain power of e then this criterion cannot be applied.
Q5. What is centroid in root locus ?
OR
What is centroid of asymptotes and how the centroid is calculated?
Ans. All asymptotes intersect the real axis at a common point known as centroid.

where, P = Number of open loop poles
Z = Number of open loop zeros.
Q6. Define the term breakaway point.
Ans. Breakaway point is defined as the point at which root locus comes out of the real axis.
Q7. What is the effect of addition of pole on root locus?
Ans. The system becomes less stable and becomes more oscillatory when a pole is added to the open loop transfer function, pushing the root locus to the right of the original root locus.
Q8. What is the effect of addition of zero on root locus?
Ans. The system becomes more stable and less oscillatory when a zero is added, pushing the root locus to the left of the initial root locus.
Q9. What is root contour ?
Ans. The locus of root of characteristics equation obtained by varying parameter of the system other than K from 0 to ∞ is called root contour of the system.
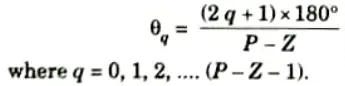
Q10. Define asymptote.
Ans. The line which touches the curve at infinity is known as asymptote. For (P – Z) branches, angle of such asymptote is given by :
Q11. How will you find the gain K at a point on root locus ?
Ans.

Unit-IV: Frequency Response Analysis (Short Question)
Q1. What is frequency response ?
Ans. The frequency response of a system is the amplitude and phase connection between the sinusoidal input and the steady state output.
Q2. What are the advantage and disadvantage of frequency response ?
Ans. A. Advantage: These methods are easy to use for design of control and for finding absolute as well as relative stability of the system.
B. Disadvantage: The frequency response test cannot be performed on non-interruptible systems.
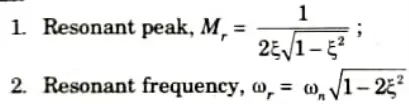
Q3. Write the expression for resonant peak and resonant frequency.
Ans.
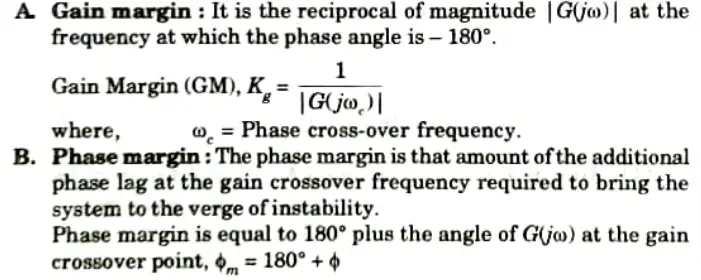
Q4. Define gain and phase margins.
Ans.
Q5. What are the advantage and disadvantage of polar plot ?
Ans. A. Advantage: It shows the frequency response characteristics of a system over the entire frequency range in a single plot.
B. Disadvantage: It does not indicate the contribution of each individual factor of the open loop transfer function.
Q6. Sketch polar plot of G(s) = 1/(1+ aS).
Ans. 1. The frequency domain transfer function is,
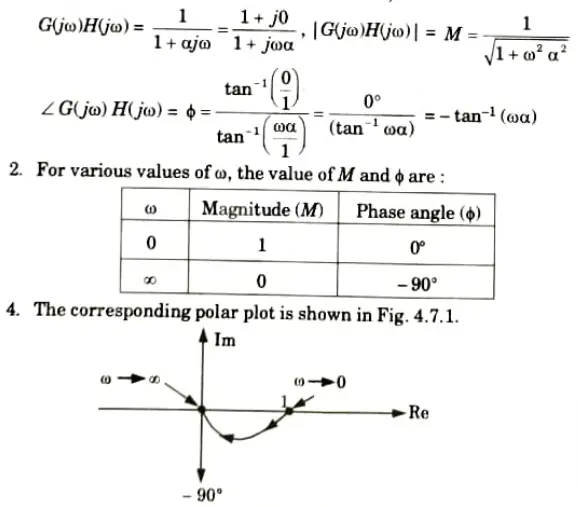
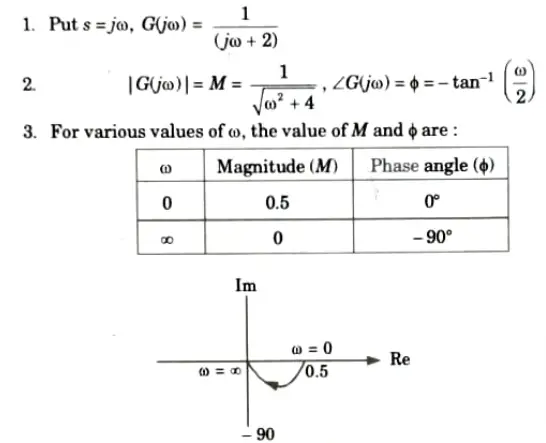
Q7. Draw the polar plot G(s) = 1/(s +2).
Ans.
Q8. Write the condition to test the stability of Nyquist plot.
Ans. Condition to test stability, N = Z – P.
where, N= Number of encirclement of (-1+j0) point in clockwise direction.
Z = Number of closed loop poles on the right half of s-plane.
For system to be stable, Z should be zero ie., N= -P.
Q9. Write advantages of Bode Plot.
Ans. 1. The magnitudes are expressed in dB, and so, a simple procedure is available to add magnitude to each one by one.
2. The frequency domain specifications can be easily determined.
Unit-V: Introduction to Design (Short Question)
Q1. What is compensation ?
Ans. By adding an additional device called a compensator, the system behaviour is changed throughout the design process to conform to the intended standards.
Q2. Why compensators are used in control system, what is effect of lag compensator ?
Ans. A. Reason:
- 1. Compensate an unstable system to make it stable.
- 2. A compensating network is used to minimize overshoot.
- 3. These compensating networks increase the steady state accuracy of the system.
B. Effect of lag compensators: It allows high gain at low frequencies thus it is basically a low pass filter. Hence it improves the steady state performance.
Q3. What are the effects of lead compensation ?
Ans.
- 1. The lead compensator adds a dominant zero and a pole. This increases the damping of the closed loop system.
- 2. It improves the phase margin of the closed loop system.
- 3. It increases bandwidth of the closed loop system.
Q4. Define state and state variable
Ans. A. State: State of a system is the minimum amount of information needed along with initial conditions at t = t, and input excitation so that future response of system can be completely described at any time t > t0.
B. State Variables: A set of at least n variables x1(t), x2(t)………. xn(t), are needed to completely describe how a system will behave in future, along with initial state and input excitation. These minimal set of variables which can determine the state of a system are known as state variables.
Q5. Define state variable and state space.
Ans. 1. State variables: The variables involved in determining the state of dynamics system are called state variables.
2. State space: The n-dimensional space whose coordinate axis consists of the x1 axis, x2 axis ……….xn axis is called state space. Any state can be represented by a point in the state space.
Q6. Discuss the advantages of state variable technique over transfer function approach.
Ans. 1. This method can be applied to linear or non linear, time variant or time invariant system.
2. This method can be designed for optimal conditions.
Q7. What is state transition matrix ?
Ans. The matrix that satisfies the linear homogeneous state equation is known as state transition matrix.

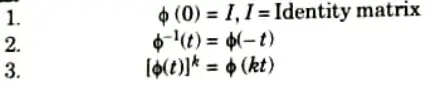
Q8. Enlist the properties of state transition matrix.
Ans.
Q9. Explain the concept of controllability and observability.
Ans. 1. Controllability: If the desired state of the system can be changed over a specific time period by applying input, the system is said to be controllable.
2. Observability: If all of a system’s state can be ascertained using information about the output of the system at a particular time, the system is said to be observable.
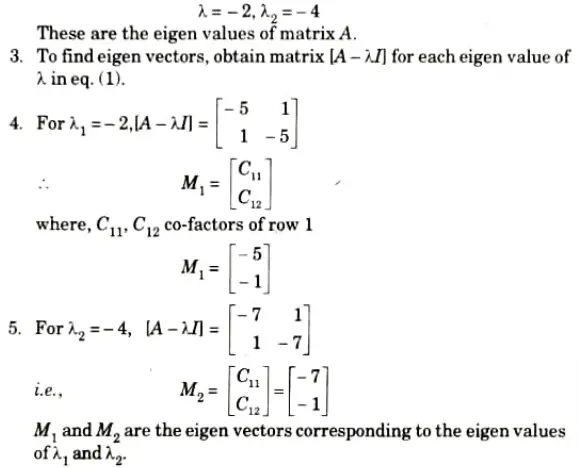
Q10. Find the eigen vectors of the matrix.
Ans. 1. The characteristics equation for eigen values,
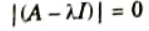
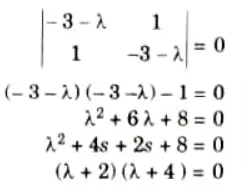
2. Solving characteristic equation,
Q11. When lag/lead/lag-lead compensation is employed?
Ans.
- 1. Lag compensation is employed for a stable system for improvement in steady state performance.
- 2. Lead compensation is employed for stable/unstable system for improvement in transient-state performance.
- 3. Lag-lead compensation is employed for stable/unstable system for improvement in both steady-state and transient state performance.

Control System Btech Quantum PDF, Syllabus, Important Questions
| Label | Link |
|---|---|
| Subject Syllabus | Syllabus |
| Short Questions | Short-question |
| Question paper – 2021-22 | 2021-22 |
Control System Quantum PDF | AKTU Quantum PDF:
| Quantum Series | Links |
| Quantum -2022-23 | 2022-23 |
AKTU Important Links | Btech Syllabus
| Link Name | Links |
|---|---|
| Btech AKTU Circulars | Links |
| Btech AKTU Syllabus | Links |
| Btech AKTU Student Dashboard | Student Dashboard |
| AKTU RESULT (One VIew) | Student Result |