
Table Of Contents
B.Tech AKTU Quantum Book will introduce you to the realm of Sensor and Transducers. Get access to important notes, frequently asked questions, and valuable information for learning this fundamental area. Unit-3 Machine Vision
Dudes 🤔.. You want more useful details regarding this subject. Please keep in mind this as well. Important Questions For Sensor and Transducers: *Quantum *B.tech-Syllabus *Circulars *B.tech AKTU RESULT * Btech 3rd Year * Aktu Solved Question Paper
Q1. What is machine vision ?
Ans.
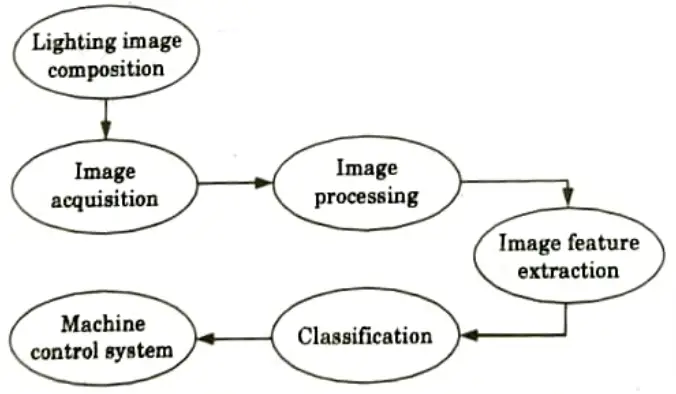
- 1. As shown in Fig., machine vision systems evaluate images captured by cameras to produce image feature data that instructs robotic and automation machines on how to comprehend the physical environment.
- 2. Vision is a sensory input that can generate detailed information that, in many cases, can only be accessed through vision.
- 3. To measure aspects of the image content that can be used immediately from the enormous quantity of data contained in images, a machine vision system is required.
- 4. Image processing and machine vision are two different concepts. New images are created from existing images by image processing.
- 5. In the early phases of machine vision, image processing is utilised for tasks including filtering, segmentation, edge detection, and geometric operations.
- 6. Machine vision systems do not often use all image processing algorithms.
- 7. De-blurring, picture stitching, and image and video compression are a few examples of image processing methods that are of secondary importance to machine vision.
- 8. The meanings of two further related concepts that are frequently used, computer vision and robotic vision, are nearly identical to those of machine vision and mainly differ in their intended applications.
- 9. A system that does not have control over external machines is said to as having computer vision.
- 10. For instance, a computer vision application would often be referred to as facial recognition for security verification.
Q2. What are the applications of computer and machine vision ?
Ans. A. Computer vision:
- 1. Medical: This method is used to find anomalies in medical scans like cardiograms, CT scans, and MRIs.
- 2. Insurance: Based on pattern recognition, computer vision can distinguish between purposeful and unintentional harm.
- 3. Defense and security: Computer vision may be used to automate surveillance in order to find probable criminal activities.
- 4. Automotive: Computer vision technology is used in self-driving cars to power machine learning procedures.
B. Machine vision:
- 1. Automatic inspection: Machine vision can evaluate products far more quickly than a human can, which improves operational effectiveness.
- 2. Quality control:
- i. Automatic quality control is essential for finding errors in complex designs, such as barcodes, that people would find difficult to assess.
- ii. It may accelerate practically any routine quality check by automatically performing pass/fail actions based on the outcome of the assessment.
- 3. Robot guidance:
- i. Several robotic guidance processes require the use of machine vision.
- ii. These programmes boost speed while enabling more accurate positioning and sorting by interpreting visual information about the robot’s surroundings.
Q3. Explain Charge-Coupled Device (CCD) imaging sensors with suitable example.
Ans. 1. From digital astronomy to machine vision inspection, the charge-coupled device (CCD) is a technique for taking pictures. As seen in Fig., the CCD sensor is a silicon chip with a variety of photosensitive spots.
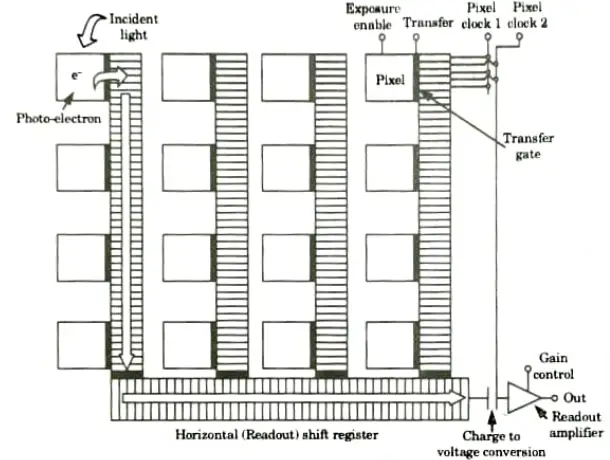
- 2. The name “charge-coupled device” really refers to a shift register, or “bucket brigade,” that is used to transport charge packets from the photosites to the readout on the chip.
- 3. A capacitor transforms clock pulses into voltage after they have moved charge packets throughout the chip by creating potential wells.
- 4. Although the CCD sensor is an analogue device in and of itself, the output of digital cameras’ analog-to-digital converters (ADCs), either ON or OFF chips, is immediately converted to a digital signal.
- 5. With analogue cameras, synchronization pulses are inserted at some point in the signal chain to allow for the reconstruction of the image as the voltage from each site is read out in a specific order.
- 6. The charge transier, which also contributes to the CCD’s great sensitivity and pixel-to-pixel uniformity, is to blame for the fundamental CCD shortcoming of speed because the charge packets are constrained by the speed at which they can be transferred.
- 7. Because every charge packet experiences the same voltage conversion, the CCD’s photosensitive spots are all highly uniform.
- 8. Charge from one photosensitive site spreads over to nearby sites because to a limited well depth or charge capacity, a phenomenon known as blooming.
- 9. In photos from CCD cameras, this phenomena appears as bright dots that smear out.
- 10. Microlenses are employed to boost the fill factor, or effective photosensitive area, in order to make up for the low well depth in the CCD and the space the charge-coupled shift registers occupy on the chip.
- 11. This enhances the angular sensitivity for incoming light rays, making it necessary for them to strike the sensor close to normal incidence for optimal collection. This improves the pixel efficiency.
Q4. Discuss Complementary Metal Oxide Semiconductor (CMOS) imaging sensors.
Ans.
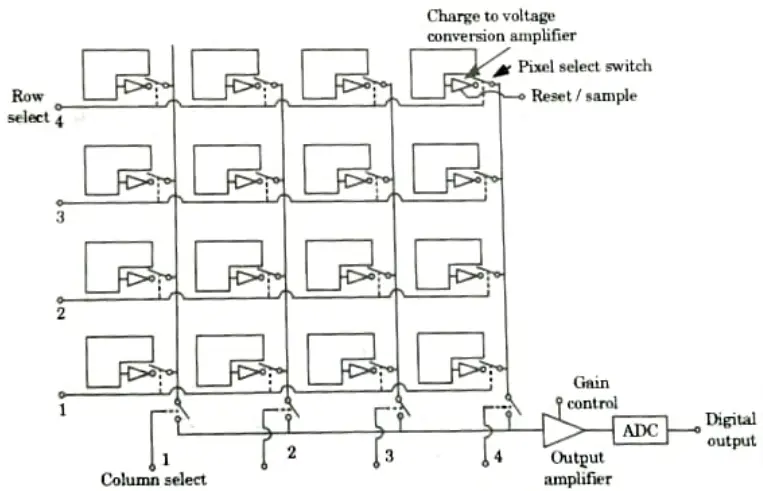
- 1. In a complementary metal oxide semiconductor (CMOS) sensor, the signal is multiplexed by row and column to various on-chip digital-to-analog converters after the charge from the photosensitive pixel is transformed to a voltage at the pixel site (DACs).
- 2. CMOS is a digital device by nature of its construction. As illustrated in Fig., each site consists primarily of a photodiode and three transistors that perform the amplification and charge conversion, selection or multiplexing, and resetting or activation of the pixel operations.
- 3. This causes the multiple charges to voltage conversion circuits to be fabricated inconsistently, which results in the multiple charges to voltage conversion circuits’ fast speed but low sensitivity and significant fixed-pattern noise.
- 4. An electronic rolling shutter is frequently used in conjunction with a CMOS sensor’s multiplexing design.
- 5. Nevertheless, a global shutter can be achieved where all pixels are exposed concurrently and then read out sequentially. This can be done by adding more transistors to the pixel site.
- 6. Another benefit of a CMOS sensor is that it uses less power and dissipates less heat than an identical CCD sensor since there is less charge or current flowing through it.
- 7. The CMOS sensor can also be used in specialized high dynamic range cameras, even able to image welding seams or light filaments, due to its capacity to withstand high light levels without blooming.
- 8. Because digital CCD cameras need extra off-chip ADC hardware, CMOS cameras are typically smaller than their digital CCD counterparts.
- 9. A CMOS sensor’s effective collection efficiency or fill factor is lower than a CCD counterpart because the multilayer MOS production method does not permit the utilization of microlenses on the chip.
- 10. This low efficiency combined with pixel-to-pixel inconsistency contributes to a lower signal-to-noise ratio and lower overall 1mage quality than CCD sensors.
Q5. Give the applications of VGR systems.
Ans. VGR systems are typically used for high-volume, highly repeatable processes. Some of the more common applications include :
- 1. Loading/unloading parts from conveyors and feeding systems.
- 2. Loading/unloading nested parts from trays or boxes.
- 3. Part placement, assembly and packaging.
- 4. Racking and de-racking.
- 5. Palletizing and de-palletizing.
- 6 Bin picking of random parts.
Q6. Discuss about training a robot architecture using the Animal (AT) Model.
Ans.
- 1. The AT robot design paradigm entails a robot that responds verbally to commands to carry out beneficial behaviours and tasks that have been programmed by a human user.
- 2. Physically, it is a mobile platform carrying a camera for object recognition and an arm for grasping and manipulating. A robot architecture that can implement this model consists of:
- i. A behaviour manager
- ii. A task manager
- iii. A dialog manager.
- 3. The behaviour manager analyses sensor data to operate actuators, such as the robot’s motors for its arms and wheels (or legs).
- 4. The task manager chooses and carries out the duties that the dialogue manager assigns to it. It transforms behaviours into activities that accomplish a goal.
- 5. The dialogue manager serves as the link between the task manager and the human user. To choose tasks and add new tasks, it talks with the task manager.
- 6. The behaviour manager controls the various actuators of the robot based on the active behaviours and the identities and relative placements of objects.
- 7. It is made up of actuator processors for local control of actuator motors, analogue logic system for converting this information into actuator control signals, and sensor processors (such as the vision system) to recognise and locate things.
- 8. The task manager completes tasks that have already been provided by the user.
- 9. The task manager also decides whether or not the task was successful and when it is completed.
- 10. Tasks can succeed or fail, and they can succeed in more than one way because the robot operates in an uncertain environment. The task manager has to know what to do if a task fails.
- 11. The dialogue manager offers task managers and human users structured natural language communication.
- 12. All that is in the robot is what we put in it. We enter the words and phrases we want it to understand, along with the answers to the sentences we want it to understand.
- 13. The robot may initially simply need to understand a few statements and tasks in order to be helpful. This figure is simply and gradually expandable over time.
- 14. The limited vocabulary and discourse, which are normally a problematic challenge, can help with speech recognition. There is a memory for episodes in the dialogue manager.
- 15. This memory stores task-related data from the task manager, including completed tasks and objects identified during task execution. The episodic memory keeps track of completed tasks and details unique to each one.

Sensor and Transducers Btech Quantum PDF, Syllabus, Important Questions
| Label | Link |
|---|---|
| Subject Syllabus | Syllabus |
| Short Questions | Short-question |
| Question paper – 2021-22 | 2021-22 |
Sensor and Transducers Quantum PDF | AKTU Quantum PDF:
| Quantum Series | Links |
| Quantum -2022-23 | 2022-23 |
AKTU Important Links | Btech Syllabus
| Link Name | Links |
|---|---|
| Btech AKTU Circulars | Links |
| Btech AKTU Syllabus | Links |
| Btech AKTU Student Dashboard | Student Dashboard |
| AKTU RESULT (One VIew) | Student Result |