Subject- Basic Signal and System , Electrical and electronics engineering, Unit 01: Continuous Time Signals and Systems, is a Btech subject offered by AKTU. I sincerely hope that this article will be useful to you as you study for your AKTU exams.
Dudes 🤔.. You want more useful details regarding this subject. Please keep in mind this as well. Important Questions For Basic Signals and Systems : *Unit-01 *Unit-02 *Unit-03 *Unit-04 *Unit-05 *Short-Q/Ans *Question-Paper with solution 21-22
Q1. What is signal ? Also explain continuous-time and discrete-time signals.
Ans.
A. Signal: It is an objective physical quality that changes in relation to time, space, or any other independent variable or variables. It provides details on the behaviour or makeup of the phenomena.
B. Continuous-time signals:
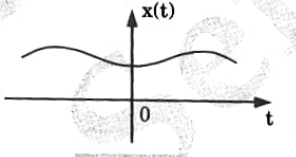
1. Continuous-time signals are those that have definitions for every instant of time.
2. Analog signals are another name for continuous-time signals.
3. Fig. shows the graphical representation of continuous-time signals.
C. Discrete-time signals:
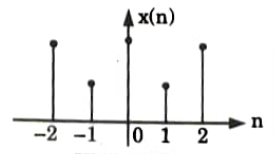
1 Discrete-time signals are those that can only be defined at specific points in time.
2. Fig. shows the graphical representation of discrete time signals.
Q2. Define various elementary signals. Indicate graphically.
Ans. Singularity functions:
1. Singularity functions include step, impulse, and ramp functions.
2. Generalized functions are another definition for singularity functions. Instead of being described by its value at every instant in time, a generalised function is defined by how it affects other functions. The term “singularity function” refers to all subsequent derivatives and integrals of the unit impulse function.
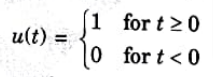
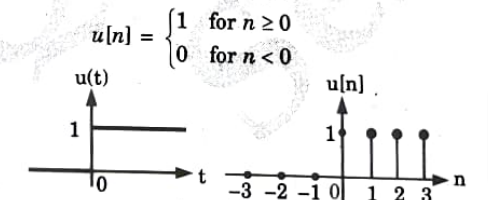
i. Unit-step signal:
For continuous-time signal: It is denoted as u(t) and is defined as
For discrete-time signal:
It is denoted as u[n] and is defined as
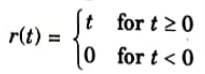
ii. Unit ramp signal:
For continuous-time signal: It is denoted as r(t) and defined as
For discrete-time signal:
It is denoted as r(n) and is defined as

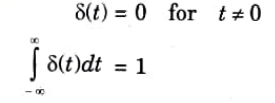
iii. Unit-impulse signal:
For continuous-time signal: It is denoted as δ(t) and is defined as and
For discrete-time signal: It is denoted as δ[n] and is defined as

Q3. Prove that power of energy signal is zero over infinite time.
Ans. a. Proof: The power of the energy signal is zero over infinite time:
1 Let x(t) be an energy signal, i.e.,

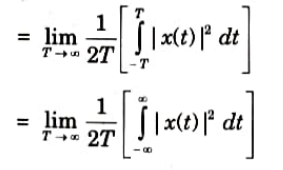
2. Power of the signal
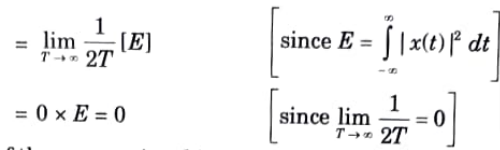
3. Thus, the power of the energy signal is zero over infinite time.
b. Proof: The energy of the power signal is infinite over infinite time:
1. Let x(t) be a power signal, i.e.,
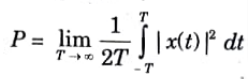
2. Energy of the signal
3. Let us change the limits of integration as -T to T and take limit T → ∞.
4. This will not change the meaning of E,
5. Thus, the energy of the power signal is infinite over infinite time.
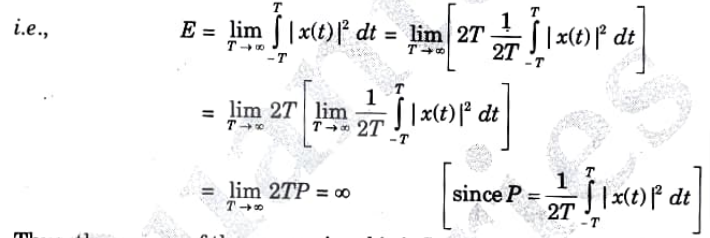
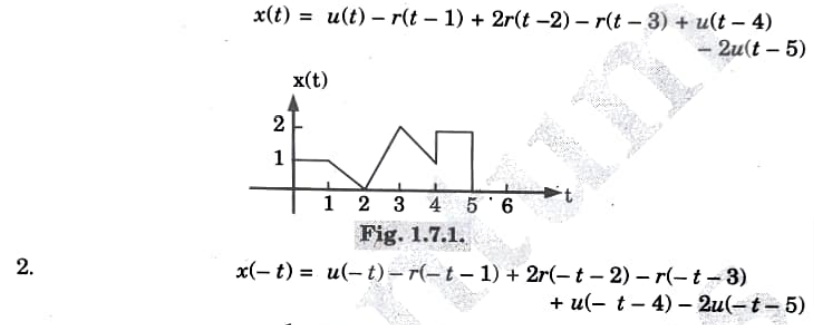
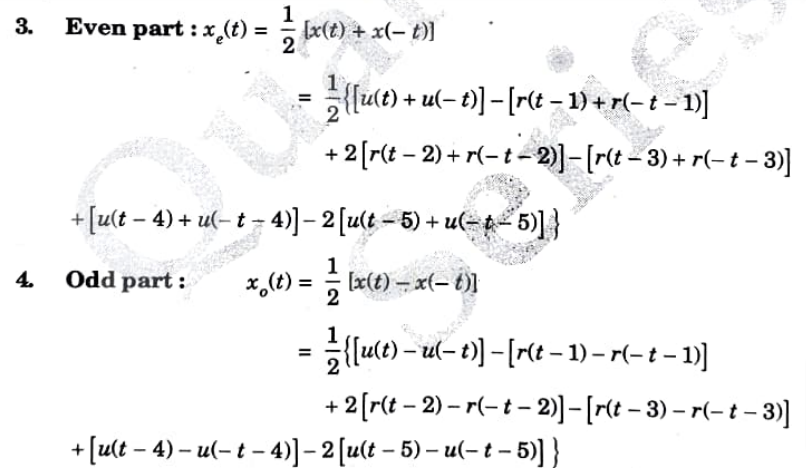
Q4. Plot () = u(t) – r(t – 1) +2r(t – 2) – r{t -3) + u(t – 4) – 2u(t 5). Find the even and odd parts of the signals.
Ans. 1. Given,
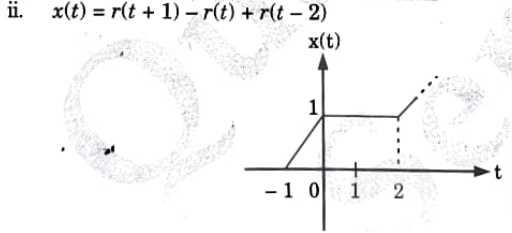
Q5. Sketch the function:
i. r(t)= u(t) + 2u(t) +3u(t-4) -u(t-5)
ii. x(t)= r(t + 1)-r(t) + r(t-2)
Ans.

Q6. Discuss various types of systems.
Ans. Classification of system:
The systems can be classified as follows:

Continuous-time systems: A system is referred to as a continuous-time system if it accepts a continuous-time signal as an input and produces a continuous-time signal as an output.

The continuous-time systems are motors, filters, and amplifiers.
2. Static and dynamic system:
i. For a static or memoryless system, the output at any moment t (or n) depends only on the input applied at that instant t (or n), not on the previous or future values of input. A system is considered to be static or memoryless if the response is due to present input alone.
Example, y(t) = a(t- 1)
y(t) = x(t) + x(t + 2)
3. Causal and non-causal system:
i. If the output of a system at any time t depends only on the past and current values of the input but not on future inputs, the system is said to be causal (non-anticipative). Causal systems operate in real time.
Example, y(t) = x(t -2) + 2x(t)
y(t) = tx(t)
ii. If the output of a system at any moment t depends on future inputs, the system is said to be non-causal (anticipative). They don’t really exist right now.
Example, y(t) = r(t + 2) + 2x(t)
y(t) = x2(t)+ tx(t + 1)
4. Linear and non-linear system:
i. A linear system is one that complies with the superposition and homogeneity principles.
ii. A non-linear system is one that deviates from the superposition and homogeneity principles.
5. Time-invariant and time-variant system:
i. A system’s ability to be time-invariant means that it has behaviour that is independent of time. This means that the behaviour of the system does not depend on the time at which the input is applied.
ii. A time-variant system is one that does not meet these criteria.
6. Stable and unstable system:
i. If a system’s input and output are constrained, it is considered stable (BIBO).
ii. For stable system, the output signal must satisfy the following condition:

where, My → finite positive number.
iii. The input signal must also satisfy the following condition:

where, Mx → finite positive number.
iv. Ifany system does not follow BIBO condition, then that system is called unstable system.

Basic Signal And System Quantum, Syllabus, Important Questions
| Label | Link |
|---|---|
| Subject Syllabus | Syllabus |
| Short Questions | Short-question |
| Important Unit-1 | Unit-1 |
| Important Unit-2 | Unit-2 |
| Important Unit-3 | Unit-3 |
| Important Unit-4 | Unit-4 |
| Important Unit-5 | Unit-5 |
| Question paper – 2021-22 | 2021-22 |
Basic Signal And System Quantum PDF: | AKTU Quantum PDF:
| Quantum Series | Links |
| Quantum -2022-23 | 2022-23 |
AKTU Important Links | Btech Syllabus
| Link Name | Links |
|---|---|
| Btech AKTU Circulars | Links |
| Btech AKTU Syllabus | Links |
| Btech AKTU Student Dashboard | Student Dashboard |
| AKTU RESULT (One VIew) | Student Result |
4 thoughts on “Unit 01 Continuous Time Signals and System -AKTU | Basic Signal and System”